

高压电源在机器人技术中的应用与挑战
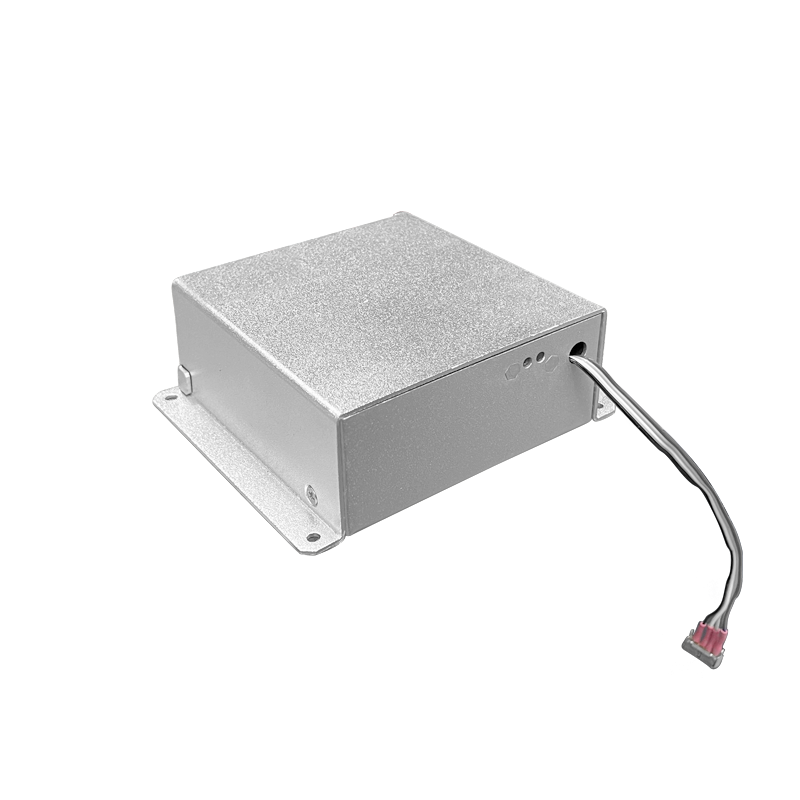
高压电源作为机器人技术体系中的关键能源组件,其性能表现直接影响机器人在复杂场景下的运动精度、负载能力与环境适应性。随着机器人技术向智能化、模块化、极端环境作业方向的演进,高压电源的技术创新成为突破传统应用瓶颈的核心驱动力。其在驱动系统、感知交互、能源管理等领域的深度应用,正推动机器人技术向更高维度发展。
一、高压电源在机器人核心系统中的应用场景
在机器人驱动系统中,高压电源是伺服电机与电驱动关节的能量基石。通过提供稳定的高电压输入(通常为数百至数千伏),可显著提升电机的功率密度与响应速度。例如,在人形机器人的关节驱动模块中,高压电源支撑的永磁同步电机系统能够实现瞬时峰值功率输出,使机器人完成跳跃、攀爬等动态高负荷动作。同时,高压环境下的电驱系统可减少电流幅值,降低导线内阻引起的能量损耗,提升续航效率,这一特性在物流仓储机器人的长时作业场景中尤为重要。
在感知与交互领域,高压电源为新型传感器技术提供了关键支撑。静电吸附式末端执行器通过高压电源产生的静电场实现对非磁性物体的抓取,该技术已应用于精密电子器件装配机器人,可避免传统机械爪对脆弱元件的物理损伤。此外,在生物医学机器人领域,基于高压脉冲的电穿孔技术能够在细胞膜上形成纳米级孔洞,为药物递送或基因编辑机器人提供精准的细胞操作手段,展现了高压电源在微观操作场景中的独特价值。
二、极端环境作业中的技术挑战
机器人在太空、深海、核辐射等高风险环境中的应用,对高压电源的可靠性提出了严苛要求。极端温度适应性是首要挑战:在太空环境中,电源系统需耐受-270°C至+120°C的剧烈温差,传统绝缘材料可能因热胀冷缩效应出现龟裂,导致高压泄漏。而在深海高压环境下(如11000米深海),电源壳体的抗压设计需平衡机械强度与绝缘性能,防止海水渗入引发短路故障。
电磁兼容与抗干扰设计是另一技术难点。机器人搭载的精密传感器与控制系统对电磁噪声高度敏感,高压电源的开关元件(如IGBT模块)在高频工作时产生的电磁辐射可能干扰导航系统的信号传输。例如,在巡检机器人执行电力设备检测任务时,电源自身的电磁干扰可能掩盖设备局部放电的微弱信号,导致故障诊断误判。如何通过拓扑优化与屏蔽技术实现高压电源的低噪声运行,成为跨学科研发的关键课题。
三、技术创新路径与发展趋势
当前,高压电源在机器人领域的技术创新正沿着轻量化、集成化、智能化方向突破。宽禁带半导体技术的应用(如碳化硅MOSFET)可将电源工作频率提升至兆赫级,显著减小无源器件体积,使高压电源的功率密度提升3-5倍,这一特性对空间受限的无人机、穿戴式外骨骼机器人具有重要意义。同时,三维封装技术通过堆叠式电路板设计与微纳制造工艺,将电源模块的体积压缩至传统方案的1/4,为微型仿生机器人的能源系统微型化提供了可能。
在智能化管理层面,基于模型预测控制(MPC)的电源管理系统可实时优化电压输出策略。例如,在救灾机器人穿越复杂地形时,系统通过传感器获取机器人姿态数据,动态调整各关节驱动电源的电压分配,实现能量利用率提升20%以上。此外,无线能量传输技术与高压电源的结合正在开拓新应用场景:通过磁共振耦合方式,高压电源可向移动中的机器人实时补充能量,解决传统有线供电的空间限制,该技术已在部分仓储AGV机器人中完成原型验证。
四、跨学科协同的未来展望
机器人技术的发展依赖多学科的深度融合,高压电源领域的突破需与材料科学、控制理论、热管理技术协同创新。例如,新型纳米绝缘材料的研发可提升电源系统的耐高压寿命;基于强化学习的智能控制算法可动态平衡电源输出与机器人运动能耗;相变冷却技术的应用可解决高压元件的热聚集问题,将电源工作温度降低30°C以上。
展望未来,随着氢燃料电池、超级电容等新型储能技术与高压电源的深度整合,机器人的能源供给模式将向多元化方向演进。高压电源不仅是能量的提供者,更将成为机器人系统的智能核心之一,通过实时数据交互与能量优化,推动机器人在工业制造、医疗手术、深空探测等领域实现更复杂的任务执行能力。